Artículo patrocinado por Extraco, Misturas, Lógica, Enmacosa e Ingeniería InSitu, dentro del proyecto SITEGI, cofinanciado por el CDTI. (2012).
Article sponsored by Extraco, Misturas, Lógica, Enmacosa and Ingeniería Insitu inside the SITEGI project, cofinanced by the CDTI. (2012)
Realizado por: Performed by: Higinio González-Jorge, Pablo Rodríguez-Gonzálvez, Diego González-Aguilera, María Varela-González
Resumen / Abstract.
Realización de un artefacto de bajo coste para la comparación de dos sistemas de metrología de escaneo láser terrestre: Riegl LMS Z390i y Trimble GX. El artefacto se basa en cinco esferas equidistantes y siete cubos de diferentes dimensiones. La precisión y la repetibilidad se evalúan utilizando los mínimos cuadrados ajustadas (LSF) y algoritmos de consenso de la muestra al azar, para el caso de estudio de las esferas, y el plano de LSF y el análisis estadístico de los cubos. La resolución horizontal se evaluó utilizando un enfoque de función de transferencia modulada y la vertical con los datos de precisión y repetibilidad a lo largo del eje Z. El sistema Trimble permite mejores resultados para todos los parámetros, piezas y algoritmos estudiados.
A low cost physical artifact with traceability to the national standard – meter is used for the metrological comparison of two terrestrial laser scanning systems: Riegl LMS Z390i and Trimble GX. The artifact is based on five spheres equidistantly situated and seven cubes of different dimensions. Accuracy and repeatability are evaluated using least squares fitting (LSF) and random sample consensus algorithms, for the study case of the spheres, and plane LSF and statistical analysis for the cubes. The horizontal resolution is evaluated using a modulated transfer function approach and the vertical one with the accuracy and repeatability data along Z axis. The Trimble system shows better results for all parameters, artifact parts, and algorithms under study.
2011 Society of Photo-Optical Instrumentation Engineers (SPIE). [DOI: 10.1117/1.3646395]
1 Introducción / Introduction
Los escáneres láser terrestres se han convertido en instrumentos de gran utilidad durante los últimos años en áreas como el patrimonio cultural, (1-3) ingeniería civil, (4, 5) estudios ambientales, (6) o ingeniería inversa (7). Estos sistemas generan un conjunto de información sobre las coordenadas geométricas detallados de un objeto, que una vez post-procesado crea un modelo para la visualización realista (8) tridimensional.
Los escáneres láser logran una alta resolución y son difíciles de obtener con otros instrumentos topográficos, por ejemplo, estaciones totales.
Se han realizaron un gran número de trabajos sobre la calibración de sistemas de escaneo láser terrestre durante los últimos años. Se han orientado principalmente al desarrollo de modelos matemáticos para describir el comportamiento de los errores sistemáticos, suponiendo un acercamiento entre las estaciones totales y escáneres láser terrestres. Estos modelos permiten mejoras en la precisión de 36% en la evaluación experiments.(9-14). Otro resultado de estos trabajos muestran que el intervalo de muestreo (paso-ancho) no es el único indicador de la resolución y que deben complementarse con la divergencia del haz láser. Por otra parte, la repetibilidad disminuye con un aumento de rango de medición.
Aunque importantes progresos se realizaron en la metrología de escaneo láser en la última década, todavía hay algunas áreas que necesitan mejorar. Es muy importante desarrollar herramientas para comparar las características metrológicas de los diferentes sistemas de escaneo láser disponibles en el mercado, en la misma forma que otros instrumentos de medición de coordenadas (15-17) en este trabajo se presenta un procedimiento técnico para establecer una comparación entre diferentes sistemas de escaneo láser terrestre, basados en un artefacto físico diseñados especialmente para este propósito. El procedimiento y el artefacto asociado aparecen como una herramienta sencilla para mejorar los procesos de control de calidad de este tipo de instrumentos, durante el proceso de compra o durante el funcionamiento normal. Además, el procedimiento se prueba mediante la comparación de dos escáneres sistemas de láser: Riegl LMS Z390i y Trimble GX.
Terrestrial laser scanners have emerged as very useful instrumentation during the last years in areas like cultural heritage,1–3 civil engineering,4, 5 environmental studies,6 or reverse engineering.7 These systems generate a detailed data set with information about the geometrical coordinates of an object, which is usually post-processed to create a computer aided design model for the realistic visualization
of the features of interest and detailed three-dimensional representations.8 The products from laser scanners achieve high resolution and are difficult to obtain from other topographic instruments, for example, total stations.
A number of works about the calibration of terrestrial laser scanning systems were performed during the past years. They have been mainly orientated to the development of mathematical models to describe the behavior of the systematic errors, assuming an approach between the total stations and terrestrial laser scanners. These models allow improvements in accuracy of 36% in assessment experiments.9–14 Another result from these works depict that the sampling interval (step-width) is not the only indicator of resolution and it must be complemented with the divergence of the laser beam. On the other hand, the repeatability decreases with a measurement range increase.
Although important progresses were performed in laser scanning metrology during the last decade, there are still some areas in need of improvement. It is very important to develop tools to compare the metrological characteristics of the different laser scanning systems available in the market, in the same way as other instruments like coordinate measuring machines.15–17 This paper presents a technical procedure to establish a comparison between different terrestrial laser scanning systems, based on a physical artifact specially designed for this purpose. The procedure and the associated artifact appear as a simple tool to improve the quality control processes of these kinds of instruments, during the purchasing process or during normal operation. In addition, the procedure is tested by comparing two laser scanners systems: Riegl LMS Z390i and Trimble GX.
2 Materiales y métodos / Materials and Methods
2.1 Artefacto físico / Physical Artifact
El aparato para metrología se compone principalmente de cinco esferas delrin equidistantes y montadas en un bloque de aluminio y siete cubos de diferentes dimensiones, mecanizadas utilizando un sistema de control numérico por ordenador preciso (Fig. 1). Las esferas presentan un diámetro nominal de 100 mm y los siete cubos muestran una longitud lateral de 100, 80, 60, 40, 30, 20, y 10 mm, respectivamente. Las esferas son preferibles a los objetivos bidimensionales típicos (2D) porque aparecen como una mejor geometría para transferir la trazabilidad desde las tecnologías más precisas, tales como máquinas de medición de coordenadas. Las máquinas de medición de coordenadas obtienen las mediciones geométricas en la superficie de las esferas utilizando un palpador y el centro se obtienen mediante un algoritmo de software.
The physical artifact developed for the metrological purposes mainly consists of five delrin R spheres equidistantly assembled on an aluminum block and seven cubes of different dimensions, machined using a precise computer numerical control system (Fig. 1). The spheres present a nominal diameter of 100 mm and the seven cubes show a side length of 100, 80, 60, 40, 30, 20, and 10 mm, respectively. The spheres are preferred over typical two-dimensional (2D) targets because they appear as a better geometry to transfer traceability from more accurate technologies such as coordinate measuring machines. The coordinate measuring machines obtain the geometric measurements on the surface of the spheres using a touch probe and the center is obtained using a software algorithm.
 |
| Fig. 1 Aparato de referencia del sistema de coordenadas. Un código es asignado a cada esfera (S1... .S5) y el cubo (C1.. .C7.). Fig. 1 Physical artifact and reference coordinate system. A code isassigned to each sphere (S1. . . .S5) and cube C1. . . .C7). |
Las máquinas de medición de coordenadas están compuesta de sistemas de medición de tres ejes (X, Y, y Z) ortogonales entre en un típico sistema de coordenadas 3D. La máquina lee directamente la entrada de la sonda de contacto por el manejo del operador o automáticamente usando una rutina de software. Estos sistemas normalmente pueden alcanzar una precisión de 10 micras de longitud m si se acompañan con un procedimiento de medición estricta (controlando las condiciones ambientales). Están especialmente indicadas para el control de calidad de bajas tolerancias en las piezas fabricadas y son muy comunes en automoción o aeroespaciales. El aparato es portátil (16,4 kg) y da la posibilidad de realizar comparaciones entre diferentes sistemas de escaneo láser. También puede ser útil para escáneres de triangulación o en sistemas fotogramétricos. En el último caso, se aconseja el uso de objetivos complementarios.
El sistema es compatible con dos trípodes en los puntos de Airy para evitar cualquier flexión que podrían afectar a la estabilidad mecánica. La calibración del artefacto y la trazabilidad a la referencia nacional de longitud se administra usando la máquina de medición de coordenadas, Mitutoyo Euroc Apex 12010, en condiciones ambientales controladas de temperatura (20 ± 2 ° C) y humedad relativa (50 ± 10%). Diez puntos se toman de cada superficie de la esfera. El centro de la esfera y la desviación estándar se obtienen utilizando un ajuste de mínimos cuadrados geométricas (LSF) algoritmo. Las dimensiones de los cubos se obtuvieron de 10 puntos tocados de cada una de las caras, plano LSF, y la evaluación distancia entre los planos. En ambos casos, el software de la máquina de medición de coordenadas da automáticamente todos los datos. Estas mediciones se realizaron bajo la Entidad Nacional de Acreditación según la norma ISO 17025: 2005 en el Centro Tecnológico AIMEN (Vigo, España).
The coordinate measuring machines are mechatronics instrumentation composed of three axes (X, Y, and Z) orthogonal to each other in a typical three-dimensional (3D) coordinate system. The machine directly reads the input from the touch probe by the operator handling or automatically using a software routine. These systems can typically achieve a precision of 10 μm for lengths around 1 m if they are accompanied with a strict measurement procedure (controlled environmental
conditions, sufficient number of data, well trained technicians, etc. They are specially indicated for quality control of low tolerances in manufactured parts and they are very common in automotive or aerospace sectors.18 Tables 1 and 2 show the geometric characteristics of the physical artifact. The artifact is portable (16.4 kg) and gives the possibility of performing comparisons between different laser scanning systems. It can also be useful for triangulation scanners or in photogrammetric systems. In the last case, the use complementary targets would be recommended.
The system is supported with two tripods on the Airy points to avoid any bending that could affect mechanical stability. The calibration of the artifact and traceability to the national reference of length is given using the coordinate measuring machine, Mitutoyo Euroc Apex 12010, under environmental controlled conditions of temperature (20 ± 2 oC) and relative humidity (50 ± 10%). Ten points are taken from each sphere surface. The sphere center and the standard deviation are obtained using a geometric least squares fitting (LSF) algorithm. The dimensions of the cubes were obtained from 10 points touched from each one of the faces, plane LSF, and distance evaluation between planes. In both cases, the software of the coordinate measuring machine automatically gives all of the data. These measurements were performed under Entidad Nacional de Acreditación accreditation according to ISO 17025:2005 in AIMEN Technological Centre (Vigo, Spain).


2.2 Sistemas de láser escáner / Terrestrial Laser Scanning Systems
Las mediciones se realizaron utilizando el tiempo de vuelo (TOF) para el rango y dos codificadores para la evaluación angular. los escáneres ToF utilizan un láser bombeado por diodo y la distancia se basa en el tiempo de vuelo de cada haz de láser. Los sistemas mecánicos precisos se utilizan para colocar los espejos, que orientan el rayo láser para la medición. La nube de puntos obtenida a partir de las coordenadas esféricas (R, θ, φ) se convierten entonces directamente a coordenadas cartesianas (X, Y, Z) por software.
La gama de medición está influenciada por la variación del índice de refracción del aire y su relación con la velocidad de la luz. El índice de refracción cambia con las condiciones ambientales, especialmente para la humedad relativa y la temperatura. El software de los escáneres integran la ecuación Edlen para corregir los resultados (19). Para el funcionamiento del escáner correcto, los usuarios deben medir la temperatura y la humedad relativa e integrarlos en el software para hacer una corrección directa del conjunto de datos.
Measurements are performed using the time of flight (ToF) principle for range and two encoders for angular evaluation. ToF scanners use a diode pumped laser and the distance is based on the return flight time of each laser beam. Accurate mechatronics systems are used for positioning the mirrors, which orientate the laser beam to the measuring field. The point cloud obtained from the spherical coordinates (R, θ, φ) is then directly converted to Cartesian coordinates (X, Y, Z) by the software.
La gama de medición está influenciada por la variación del índice de refracción del aire y su relación con la velocidad de la luz. El índice de refracción cambia con las condiciones ambientales, especialmente para la humedad relativa y la temperatura. El software de los escáneres integran la ecuación Edlen para corregir los resultados (19). Para el funcionamiento del escáner correcto, los usuarios deben medir la temperatura y la humedad relativa e integrarlos en el software para hacer una corrección directa del conjunto de datos.
Measurements are performed using the time of flight (ToF) principle for range and two encoders for angular evaluation. ToF scanners use a diode pumped laser and the distance is based on the return flight time of each laser beam. Accurate mechatronics systems are used for positioning the mirrors, which orientate the laser beam to the measuring field. The point cloud obtained from the spherical coordinates (R, θ, φ) is then directly converted to Cartesian coordinates (X, Y, Z) by the software.
Measurement of range is influenced by the variability of the air refractive index and its relationship with the speed of light. The refractive index changes with the environmental conditions, especially for relative humidity and temperature. Scanners software integrates the Edlen equation to correct the results in range measurement.19 Thus, for correct scanner operation, users must measure temperature and relative humidity and integrate them in the software to make a direct correction of range data.
2.2.1 Riegl LMS-Z390i
El sistema de escaneo láser terrestre Riegl LMS-Z390i [fig. 2 (a)] está formado por una unidad precisa y rápida y el software asociado Riscan Pro. El Riegl LMS-Z390i es un sensor robusto y totalmente portátil especialmente diseñado para la adquisición rápida de puntos 3D de alta calidad.
Un espejo giratorio se utiliza para la medición vertical (máximo 80 grados) y un servomotor que gira 360 grados permite la exploración horizontal. El sistema puede acceder a datos RGB utilizando una cámara de montaje externo calibrado. Además, el escáner de láser Riegl utiliza un láser infrarrojo de clase 1, lo que indica que es intrínsecamente seguro y que no hay posibilidad de daño ocular.
The terrestrial laser scanning system Riegl LMS-Z390i [Fig. 2(a)] is formed by an accurate and fast range unit with the associated software Riscan Pro. The Riegl LMS-Z390i is a rugged and fully portable sensor especially designed for the rapid and accurate acquisition of high-quality 3D points.
A rotating mirror is used for vertical measurement (maximum 80 deg) and a servo motor that rotates 360 deg allows horizontal scanning. The system can acquire RGB data using an externally mounted calibrated camera. Furthermore, the Riegl laser scanner uses an infrared class 1 laser, which indicates that it is inherently safe and that there is no possibility of eye damage.
Un espejo giratorio se utiliza para la medición vertical (máximo 80 grados) y un servomotor que gira 360 grados permite la exploración horizontal. El sistema puede acceder a datos RGB utilizando una cámara de montaje externo calibrado. Además, el escáner de láser Riegl utiliza un láser infrarrojo de clase 1, lo que indica que es intrínsecamente seguro y que no hay posibilidad de daño ocular.
The terrestrial laser scanning system Riegl LMS-Z390i [Fig. 2(a)] is formed by an accurate and fast range unit with the associated software Riscan Pro. The Riegl LMS-Z390i is a rugged and fully portable sensor especially designed for the rapid and accurate acquisition of high-quality 3D points.
A rotating mirror is used for vertical measurement (maximum 80 deg) and a servo motor that rotates 360 deg allows horizontal scanning. The system can acquire RGB data using an externally mounted calibrated camera. Furthermore, the Riegl laser scanner uses an infrared class 1 laser, which indicates that it is inherently safe and that there is no possibility of eye damage.
 |
| Fig. 2 (a) Terrestrial laser scanner Riegl LMS-Z390i and (b) Trimble GX. |
2.2.2 Trimble GX
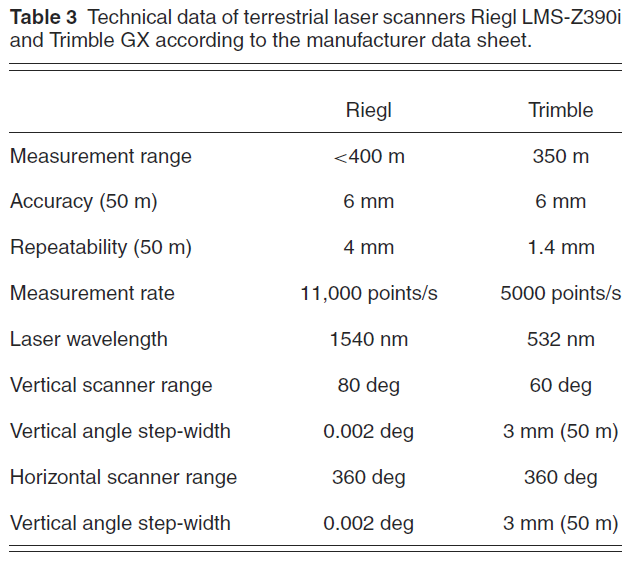
El sistema de escáner láser terrestre Trimble GX [fig. 2 (b)] permite cubrir un amplio campo de visión (360 ° H x 60 ° V) gracias a la adopción de un sistema de desviación del rayo sobre la base de un espejo oscilante. Por otra parte, además de la intensidad del haz reflejado, el Trimble GX también es capaz de adquirir datos RGB a través de la cámara de vídeo interna en tiempo real con una resolución de 768 × 576 píxeles. El escáner láser Trimble GX incorpora un compensador de doble eje, lo que garantiza que el instrumento está correctamente nivelada. El escáner de láser Trimble utiliza un láser infrarrojo de clase 2, lo que indica que no es seguro y hay posibilidad de daño ocular.Las especificaciones de los sistemas de láser se resumen en la Tabla 3.
The terrestrial laser scanner system Trimble GX [Fig. 2(b)] allows covering a large field of view (360 deg H × 60 deg V) thanks to the adoption of a beam deflection system based on an oscillating mirror. Furthermore, besides the intensity of the reflected beam, the Trimble GX is also able to acquire RGB data through the real-time internal video camera with a resolution of 768 × 576 pixels. The Trimble GX laser scanner incorporates a dual axis compensator, which guarantees that the instrument is correctly leveled. On the contrary, the Trimble laser scanner uses an infrared class 2 laser, which indicates that it is not safe and there is possibility of eye damage.
The specifications of the laser systems are summarized in Table 3.
Continúa en: http://carreteras-laser-escaner.blogspot.com/2014/08/metrological-comparison-of-terrestrial_18.html
Continued on: http://carreteras-laser-escaner.blogspot.com/2014/08/metrological-comparison-of-terrestrial_18.html
For more information or if you prefer this article in pdf-format, contact with us:
http://carreteras-laser-escaner.blogspot.com.es/p/contacte-con-nosotros.html
Or, send us an e-mail.
Continúa en: http://carreteras-laser-escaner.blogspot.com/2014/08/metrological-comparison-of-terrestrial_18.html
Continued on: http://carreteras-laser-escaner.blogspot.com/2014/08/metrological-comparison-of-terrestrial_18.html
For more information or if you prefer this article in pdf-format, contact with us:
http://carreteras-laser-escaner.blogspot.com.es/p/contacte-con-nosotros.html
Or, send us an e-mail.
No hay comentarios:
Publicar un comentario