Bibliografía
2.4 EQUIPOS DEL MERCADO
En este apartado se intenta dar una visión global de las características de los equipos GPR actualmente disponibles en el mercado. Primero describiremos los equipos de propósito general más conocidos y posteriormente nos centraremos en los equipos adaptados a estudios de carreteras y a detección de tuberías.
2.4.1 EQUIPOS DE PROPÓSITO GENERAL
Estos equipos GPR son los mas versátiles, y tienen multitud de aplicaciones. Suelen permitir la conexión de antenas de diversos tipos y con un rango de frecuencias muy variado. Es por esto que son también los que poseen un mayor número de parámetros configurables, lo que hace que por lo general, el manejo de estos equipos, requiera de un usuario con cierta experiencia. Los equipos suelen tener un diseño modular lo que en ocasiones les hace ser difíciles de manejar por un único operario. Claro que, para la mayoría de ellos, las mismas casas disponen de dispositivos que facilitan su manejo. Algunos de estos dispositivos podrán ser usados o no dependiendo de la orografía en la que se realice la prospección.
A nivel individual, el sistema RAMAC/GPR de Mala y el PulseEKKO de S&S operan tanto con antenas biestáticas de baja frecuencia (12.5-200 MHz) como con antenas, monoestáticas (RAMAC/GPR) y biestáticas (PulseEKKO), apantalladas de mayores frecuencias (100-1200 MHz), e incluso con antenas tipo borehole de baja frecuencia. Esto les proporciona una gran versatilidad y capacidad de aplicación en prácticamente cualquier área de estudio. Ambos permiten configurar ventanas de tiempos dobles de propagación muy grandes lo que les proporciona una gran profundidad de registro en los casos que sea necesario. Al mismo tiempo, la posibilidad de seleccionar unas frecuencia de muestreo y stacking elevadas, permite una gran resolución en los registros.
En el RAMAC/GPR destaca su capacidad de operatibilidad con hasta 4 antenas simúltaneas, admitiendo prácticamente cualquier configuración de Tx/Rx entre antenas que se requiera. La UC se conecta al portátil a través de un puerto paralelo en modo ECP, lo que posibilita el aumento de flujo de datos entre ellos (figura 2.14). También permite la integración de datos con GPS, vía software a través del puerto serie del ordenador.
 |
| Figura 2.14. RAMAC/GPR de Mala Geoscience. |
El sistema PulseEKKO se presenta con dos UC diferentes dependiendo del tipo de aplicación: PulseEKKO 100 y PulseEKKO 1000. La primera maneja antenas de baja frecuencia, mientras que la otra esta orientada a aplicaciones sobre profundidades medias y superficiales. La conexión con el ordenador es a través de un puerto serie, teniendo el puerto paralelo como opcional.
Estos equipos no disponen de antenas de bocina o dipolos air-coupled, sus antenas son tipo dipolo ground-coupled, con lo que deben estar situadas siempre, sino en contacto, muy cerca del medio para un mayor aprovechamiento de la energía emitida y para evitar efectos de reverberación que oscurecen los registros. Esto hace que presente problemas de operatibilidad en la evaluación de carreteras a velocidades elevadas.
El SIRveyor(TM) SIR-20 de Geophysical Survey Systems (GSSI) es también uno de los mejores equipos de propósito general que se pueden encontrar en el mercado. Esta pionera empresa norteamericana fundada en 1972 comercializa el primer equipo GPR en 1975. El SIR-20 utiliza antenas manufacturadas por la propia compañía y también es compatible con las de Radarteam Sweden AB, una empresa sueca especializada en antenas de avanzado diseño para este tipo de sistemas, de la que el SIR-20 utiliza sus antenas de sondeo (100-1000 MHz) y HBD (Dipolo mariposa hemisférico) con su característica dualidad aire/tierra.
Por lo tanto dispone de un conjunto de antenas entre los 16 y 1500 MHz. De este equipo cabe destacar su velocidad de prospección 800 scans/s que le permite la toma de datos a intervalos de 2 cm a una velocidad de 45 mph con una única antena. Esta rapidez de prospección y la posibilidad de combinarlo con antenas aéreas le hace ser un equipo muy apropiado y de fácil manejo en la evaluación de carreteras. Si embargo quizá no es muy apropiado en tareas que requieran el movimiento de una UC cuyo peso se encuentra en torno a los 10 kg, y de la que GSSI no posee ningún vehículo adaptado a su transporte. Sus antenas monoestáticas tipo dipolo apantalladas de 400 y 900 MHz resultarían apropiadas para un estudio basado en la localización de tuberías ó cables, aunque su movilidad supondrá en muchos casos un inconveniente. El sistema es compatible con GPS y permite el uso simultáneo de dos antenas durante la toma de datos. Se conecta a un ordenador portátil tipo toughbook a través de un puerto paralelo, USB o puerto Ethernet, lo que le confiere una gran versatilidad en este sentido frente a lo que es habitual en estos equipos donde el puerto paralelo (cuando no el serie) suele presentarse como la única opción posible. El SIR-20 tiene un rango dinámico de unos 110 dB.
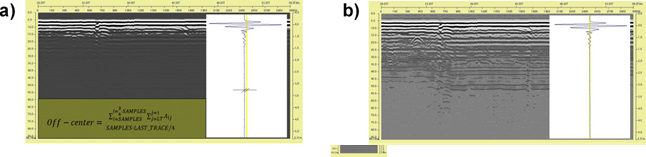
Radar Systems, es también una empresa veterana en el mundo del GPR. Su sistema, el Zond-12c dispone de un elevado número de antenas de diversos tipos y frecuencias (38-2000 MHz), lo que le confiere una gran versatilidad. Tiene un rango dinámico de 128 dB y la conexión con el portátil es a través de un puerto serie RS-232C. Radar Systems no comercializa ningún vehículo para el transporte del equipo durante la toma de datos. (Figura 2.15a).
El RIS-2K de IDS ofrece 2 posibles UC de características similares en cuanto a su procesador interno y capacidad de memoria (6 GB de disco duro interno), pero se diferencian en que una es monocanal mientras que la otra admite hasta 3 antenas al mismo tiempo. La Tx/Rx entre antenas puede ser configurada libremente vía software, permitiendo la representación de datos de más de 8 canales simultáneos.
IDS posee unos vehículos para el transporte de antenas y equipo muy innovadores (Figura 2.15b), que permiten una fácil disposición en paralelo. Esto permite que puedan ser cubiertas en poco tiempo grandes áreas de estudio y con una buena resolución y profundidad. Comercializa además una antena que es capaz de multiplexar entre dos dipolos de frecuencias centrales 600 y 200 MHz.
 |
Figura 2.15. Foto superior) Zond-12 de Radar Systems
Foto inferior) Sistema multiantena de IDS, en el que el RISK-2K se conecta a 3 antenas
que permiten multiplexar entre dos dipolos de frecuencias: 600 y 200 MHz. |
2.4.2 EQUIPOS ADAPTADOS AL ESTUDIO DE CARRETERAS
Los equipos comentados pertenecen a empresas que se han considerado punteras a nivel mundial dedicadas al desarrollo y venta de equipos GPR. Estas empresas, muchas de ellas pioneras en el desarrollo de esta tecnología, comercializan equipos de contrastadas prestaciones y es habitual encontrarlas como sponsors y también participantes de los congresos internacionales de GPR que se celebran cada 2 años desde 1986. Estas empresas son:
- Geophysical Survey System, Inc (Estados Unidos) Empresa reconocida por su sistema SIR- Subsurface Interface Radar, usados para investigar el subsuelo y estructuras de hormigón, carreteras, puentes y túneles. Disponen del sistema RoadScan especialmente adaptado para el estudio de firmes.
- MÅLA Geoscience (Suecia) Su principal producto es el RAMAC/GPR, diseñada para utilización en varios medios, permite aplicar las antenas apantalladas de diversas frecuencias 100, 250, 500, 800 y 1000 MHz y la nueva técnica multi-canal CART. Acaba de desarrollar una unidad central que permite trabajar hasta con dieciseis canales simultaneamente.
- SENSORS & SOFTWARE (Canadá) Empresa con gran experiencia en antenas de baja frecuencia, su principal producto es el PulseEkko 100, adaptado en los ultimos años a antenas de alta frecuencia mediante la aparición del PulseEkko 1000 y el desarrollo de antenas tipo horn. Sus antenas son utilizadas por numerosas empresas, pero no comercializa un sistema completo incorporado a un vehículo.
- INGEGNERIA DEI SISTEMI - IDS (Italia) Su sistema, RIS-2K/MF, se utiliza en conjunto con la unidad de adquisición multicanal AU-CU3, que permite emitir por cuatro canales y recibir por dieciseis. Han desarrollado un software específico. Autores, como consultores, de varios trabajos realizados en carreteras y en aeropuertos.
- ROADSCANNERS (Finlandia) Grupo de consultoría establecido en 1997, han desarrollado su propio sistema de radar adaptado a un vehículo y monitorizado con GPS. Así mismo, utilizan un software propio, Road Doctor, que es compatible con el resto de equipos de radar del mercado.
- ROAD RADAR LTD (Canada) Han desarrollado un radar específico para inspección de firmes. El sistema va integrado en una furgoneta y emplea un dispositivo combinado de antenas horn y dipolos operando en frecuencias entre 1-3 GHz. Procesa los registros en tiempo real y permite obtener registros continuos del espesor de las diversas capas, así como la detección de cavidades, grietas, etc.
- NDE VALIDATION CENTER (Estados Unidos) Equipos y sistemas de configuración específicos para carreteras y puentes: PERES y HERMES, controlados mediante una workstation instalada en un trailer. Se basa en un dispositivo multiantena operando en frecuencias desde 500 MHz hasta 5 GHz. Detectan imperfecciones inducidas por el paso del tiempo en el pavimento mediante aplicación de la técnica de radar de apertura sintética (SAR)
- INFRASENSE, INC (Estados Unidos) Consultores y desarrolladores de software, han adaptado dos programas (Pavlayer y Pavmenu) para el estudio de firmes de carreteras. Así mismo, disponen de un sistema completo de radar para evaluación de pavimentos en base a antenas tipo horn de Sensors &S oftware. Su sistema incluye sensores de visión infrarroja.
Estos equipos han sido específicamente pensados para la detección de tuberías y cables. Son equipos GPR de bajo coste, que pueden ser utilizados por usuarios no experimentados con un tiempo mínimo de preparación. Son prácticamente autoconfigurables, únicamente suele necesitar como parámetros de entrada la profundidad a la que se desea llegar y el tipo de suelo en el que se realizará la prospección a escoger entre tipos ya predefinido. El software también esta orientado especialmente con el propósito de resaltar los eventos producidos por la aparición de posibles tubos o tuberías. Son sistemas monocanal integrados. Normalmente poseen únicamente la opción de escoger entre dos antenas, una para detección más superficial mientras que la otra para profundidades medias. Las antenas son automáticamente reconocidas por el sistema que selecciona los parámetros de software apropiados.
Easy Locator
El Easy Locator de Mala Geoscience es uno de estos equipos. Posee dos antenas intercambiables, una para mapeados con una profundidad máxima de penetración estimada de 4m (“Mid”) y otra para aplicaciones más superficiales, hasta 2’5 m (“Shallow”). La unidad de control se sitúa sobre la antena y se conecta a un monitor TFT Utlra-Hi-Brite. Todo el equipo se integra en un carro cuyas ruedas pueden ajustarse a diferentes alturas, según el tipo de terreno. Tiene un peso de 18 Kg. La conexión es mediante un cable paralelo (figura 2.16a-b).
Pathfinder
El Pathfinder de GSSI dispone de 2 antenas transmisoras y 4 receptoras integradas en una unica caja. El equipo dispone de dipolos de 400 MHz (estándar), aunque también 600 u 900 Mhz (opcionales). Con estas antenas consigue alcanzar pronfundidades de hasta 3 ó 4 metros. En cuanto a sus parámetros técnicos, tiene una velocidad de registro de 256 scans por sec (64 por canal) obteniendo 512 muestras por scan y 16 bits por muestra. Debido a la disposición de las antenas en el interior de la caja permite configuración multipolar y multioffset. Puede ir conectado a un portátil u ordenador ligero diseñado especialmente el cual dispone de un visor ocular (figura 2.17). Contiene rueda taquimétrica y software de apoyo integrado que facilita la toma de datos. El peso total del equipo esta en torno a los 36 Kg.
Este equipo permite el posicionamiento adicional mediante GPS (figura 2.17a) o un sistema de balizas láser especialmente diseñado, que facilita la toma de una rejilla de perfiles paralelos (figura 2.17b).
Pipehawk II
Se presenta con 2 antenas disponibles: una de alta resolución para detectar objetivos de pequeño diámetro a profundidades por encima de 1.5 m y la que viene como estándar, designada para alcanzar profundidades de mas de 2.5 m dependiendo de las condiciones del suelo (figura 2.18). Ambas tienen la misma apariencia, son fácilmente intercambiables y reconocidas y configuradas automáticamente. Dispone de un disco duro incorporado en el que va almacenado la información que es representada en tiempo real en una pantalla LCD de 8.4”. Posee software de apoyo integrado. Una vez concluida la prospección, la información puede ser descargada posteriormente mediante la conexión a un ordenador cualquiera. Una autonomía de más de 4 horas, una potencia media de emisión 2mW, y un peso 44 Kg, son algunos de las características de este equipo.
Interragator II
Los parámetros introducidos en este equipo son la profundidad máxima de prospección (0.3 – 7.6 m) y el tipo de suelo. El equipo esta integrado en un carrito con rueda taquimétrica (lo que es habitual en estos equipos) y con una antena de 300 MHz. Posee una velocidad de registro de 50 scans/s y 512 muestras por traza que le permiten prospectar a velocidades de hasta 8 km/h. Permite hacer el volcado de datos, de un disco duro interno de 6.4 GB, mediante de una unidad de disquete o conectando a un ordenador a través de un puerto serie, al que también se le pueden conectar una impresora o un plotter. El peso aproximado del equipo es de unos 37 Kg
El objetivo de la representación de resultados en GPR es proveer una visualización de los datos procesados que se aproxime a una imagen del medio analizado, de forma que las anomalías asociadas con los eventos de interés estén localizadas en su correcta posición espacial. La representación es esencial en la interpretación de datos.
De hecho, obtener una buena visualización es una parte integral de la interpretación.Se puede decir que existen tres formas de visualización de los datos obtenidos:
1) mediante una traza unidimensional.
2) perfil bidimensional.
3) imagen en 3D.
La traza unidimensional no aporta mucha información hasta que varias trazas son colocadas una al lado de otra para producir un perfil bidimensional, o son colocadas en un bloque para una vista tridimensional. Una traza contiene la historia de reflexiones de un impulso generado en la antena transmisora, integrando en su forma los diferentes caminos seguidos por la señal hasta llegar a la antena receptora. Se denomina scan a una traza a la que se le ha aplicado una escala de colores a los valores de la amplitud (figura 2.20).
 |
| Figura 2.20. Asignación de una escala de colores a las diferentes amplitudes de una traza obtenida con GPR. |
La traza o scan es la unidad básica sobre la que se construyen todas las demás posibles visualizaciones. Una traza individual puede ser usada para localizar objetos (y determinar su profundidad) bajo un punto determinado de la superficie. Moviendo la antena sobre la superficie y registrando trazas cada cierto intervalo de tiempo se obtiene un perfil. El eje horizontal del registro obtenido se corresponde con la posición en la superficie, mientras que el eje vertical representa el tiempo de ida y vuelta de la onda electromagnética. Un registro obtenido con un radar de subsuelo se denomina, comúnmente radargrama. El número de trazas de un radargrama depende de la longitud del registro, de la velocidad a la que se haya deslizado la antena a lo largo del perfil, del número de pulsos por segundo emitidos por la antena, del muestreo seleccionado y de la velocidad de registro del radar. Tal como ya se ha visto estos parámetros se seleccionan adecuando la prospección al estudio y al medio. En este punto, como en tantos otros relacionados con este tipo de estudios, es necesario llegar a un compromiso entre la resolución que se desea obtener en las imágenes de radar y el tamaño de los ficheros con los que será necesario trabajar.
La visualización de los registros mediante trazas de amplitud tiene una conexión directa con otras visualizaciones utilizadas comúnmente en ingeniería (como por ejemplo las obtenidas con un osciloscopio), pero a menudo representar un perfil mediante trazas de amplitud resulta una forma de visualización poco práctica debido al elevado número de trazas que por lo general son obtenidas. Por lo tanto, la representación mediante el uso de scans (o áreas de barrido) suele la forma habitual de visualización de los perfiles bidimensionales obtenidos mediante GPR. Con este tipo de representación se consiguen efectos visuales que clarifican los resultados.
 |
| Figura 2.21. La figura A se corresponde con un radargrama mediante trazas de amplitud. La figura B representa la misma zona del radargrama pero en este caso los niveles de amplitud han sido asociados a una escala de colores (áreas de barrido). |
Para llevarla a cabo se selecciona una escala que relaciona intervalos de amplitudes con determinados colores, que pueden seleccionarse. Esta escala puede ser lineal, exponencial, potencial o se puede definir según los intereses del estudio (por ejemplo, si interesa destacar reflexiones de poca amplitud o bien no considerar estas amplitudes pequeñas). Cada uno de estos intervalos o rangos de amplitudes queda asociado a un color, de acuerdo con la escala seleccionada (figura 2.21).
 |
| Figura 2.22. Escalas utilizadas para la representación de los registros: (a) lineal y (b) no lineal. La escala de colores seleccionada es una gradación de tonos de gris y verde, diferenciando las distintas fases de las amplitudes de los pulsos. (Pérez-Gracia 2001) |
En la figura 2.22 se presentan dos de las posibles escalas, en las que se utiliza tonos de gris para los valores de amplitud máximos, blanco para las amplitudes nulas, y verde para las mínimas. Los tonos intermedios han sido interpolados a partir de estos tres. La figura 2.22a representa una escala lineal; cada uno de los intervalos de amplitudes asociado a un color determinado tiene la misma longitud que los demás.
En la figura 2.22b se presenta una escala no lineal; a cada intervalo correspondiente a un color se le ha asociado un intervalo de amplitudes, pero su longitud no es constante.
En el ejemplo de la figura 2.22 cada uno de los intervalos de amplitudes tiene una longitud doble que el anterior. Con esto se consigue que resalten y se diferencien claramente reflexiones de menor amplitud que en el caso de la escala lineal. El resultado de esta operación son unos registros en colores donde las amplitudes similares (incluidas dentro de cada intervalo) quedan representadas por un mismo color. Con estos tipos de registro pueden también diferenciarse fases de las amplitudes de los pulsos (asociando cada una de ellas a una escala de colores distinta). Este proceso se ilustra en las gráficas de la figura 2.22. En los dos casos puede verse como se diferencian las amplitudes entre negativas y positivas, tomando como cero el registro cuando no se tiene ningún tipo de excitación, asociando a las amplitudes positivas y a las negativas diferentes escalas de colores.
No se puede decir que una escala de colores sea más adecuada que otra. La selección depende del criterio del operador que trabaja con los ficheros. En muchas ocasiones es preferible trabajar con registros en amplitudes o con escalas de un único color (ya sean tonos de grises o de cualquier otro color), con la variación de tonalidad aplicada de forma gradual. Es más sencillo (aunque no tan vistoso) localizar las anomalías, ya que un registro con muchos colores puede resultar confuso, y además se debe tener siempre presente la escala utilizada y qué amplitudes se han asociado a cada color para no confundir las anomalías de cierta importancia con pequeños cambios en la amplitud de la onda. La utilización de escalas de colores puede resultar útil para destacar los elementos identificados en una presentación final.
 |
Figuras 2.23 a) Rejilla de puntos (modo estático) y
b) líneas paralelas (dinámico), para la formación de imágenes tridimensionales.
La orientación y polarización de las antenas debe ser la misma
para cada punto de la rejilla, o a lo largo de cada perfil. |
Las visualizaciones en tres dimensiones son básicamente bloques constituidos por trazas GPR que son registradas en diferentes posiciones sobre la superficie de estudio. Como se ha visto, los datos son generalmente registrados a lo largo de una línea constituyendo los denominados perfiles, (esto se corresponde con un registro continuo o dinámico) figura 2.23b o en puntos discretos sobre la superficie (modo estático) figura 2.23a.
Por lo general los bloques 3D son constituidos a partir de perfiles paralelos cercanos, habitualmente equiespaciados, como se muestra en la figura 2.24. Una vez que los bloques han sido construidos pueden ser mostrados de muy diversas maneras, como por ejemplo en forma de bloque sólido o mediante cortes del bloque utilizando diferentes planos y ángulos de corte (figura 2.25). Estos cortes se denominan slices. Las slices pueden ser planas ó de amplitud. En las planas, las distintas amplitudes quedan determinadas únicamente por los cambios de color, mientras que en las de amplitud a cada punto se le asocia además un volumen tridimensional. También son habituales los cortes mediante slices de espesor finito (“pillow” slices).
 |
| Figura 2.24. Proceso de construcción de una imagen tridimensional a partir de una serie de perfiles bidimensionales. a) serie de perfiles bidimensionales, b) vista del bloque tridimensional construido. |
 |
| Figura 2.25. Diseccionado de un bloque tridimensional en slices. |
Obtener una buena imagen tridimensional es una parte crítica de la interpretación de datos GPR. Los objetivos de interés son generalmente más fáciles de identificar y aislar en una vista tridimensional que en los perfiles bidimensionales convencionales.
La mejora de la imagen mediante la supresión del ruido y clutter, es el factor más importante para optimizar la interpretación. Una simplificación de la imagen puede ser llevada a cabo mediante los siguientes pasos:
1) Asignar cuidadosamente el color de los distintos intervalos de amplitud de la señal.
2) Mostrar únicamente una de las polaridades de la señal.
3) Usar un número limitado de colores.
4) Reducir el tamaño del conjunto de datos mostrado si la complejidad del objetivo es muy elevada.
5) Visualizar un intervalo de tiempo limitado (slice de espesor finito)
6) Seleccionar un ángulo de visión adecuado.
En caso de objetivos muy complejos (o múltiples) se puede llevar a cabo una mayor simplificación de la imagen mediante la representación únicamente de los valores de pico (máximos y mínimos) de cada traza. Las slices (o cortes) de espesor finito, tomadas en el eje de tiempos o a lo largo de una línea, presentan muchas ventajas frente a las slices infinitesimales que son usadas habitualmente para la interpretación y representación de datos GPR. Algunos ejemplos de sub-bloques que pueden ayudar a aislar y mejorar la visualización de anomalías se muestra en la figura 2.26.
 |
Figura 2.26. La representación tridimensional de datos mediante sub-bloques
resalta una región particular en el interior del bloque. |
También son posibles las denominadas vistas de silla, como la de la figura 2.27. Los programas modernos permiten realizar animaciones utilizando la rotación bajo diferentes ejes de los bloques generados así como desplazamientos de cortes horizontales, verticales o diagonales.
 |
| Figura 2.27. Otros tipos de representación 3D posibles. |
CAPÍTULO 3: DETECCION DE REDES DE SERVICIOS EN ENTORNOS URBANOS.
Continúa en:

 En español:
En español: